
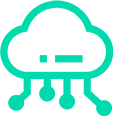
Ascbot是一款面向人工智能及机器人爱好者的开源智能机器人小车,它作为一个开放的人工智能及机器人的入门工具与学习开发平台,可以指导广大爱好者学习如何从零开始完成一个完整的AI算法及应用项目,并在其上进行二次开发。
Ascbot 智能小车概览
Ascbot introduction

易学习
预置的AI算法及应用均开放源码
并提供完整开发教程
高性能
基于人工智能芯片
提供8TOPS@FP16算力

易上手
开放的硬件清单和搭建教程
开发者可自行动手组装扩展
功能特性
- 8T Flops强大AI算力可以支持开发者完成多种AI算法及功能
- 预置多种AI视觉算法及场景功能,包括:
- 车道线识别算法及巡线行驶场景
- 障碍物检测及自主避障&防跌落场景
- 物体识别及物体跟踪场景
- 开源所有预置的AI视觉算法及应用代码以帮助开发者学习如何开发、训练及部署一个AI算法;
- 预置通过手机、电脑远程控制小车行驶功能;预置远程实时观看小车拍摄视频功能
- 预置ROS,支持开发者扩展更多机器人功能
- 开放小车硬件清单,提供小车组装视频及文档,用户可以自行DIY
应用领域

可以作为广大AI开发者及机器人爱好者的第一款AI学习/机器人学习的入门工具与开发平台

也可作为实验教具,用于中高院校及职业教育院校的人工智能/机器人/机器视觉等专业方向的实验教学课程

智能小车中用到的避障算法在自动驾驶、机器人、无人机等多种行业
传统行业可以用做智能化升级改造的AI研究开发平台
儿童&青少年动手能力
• 硬件组装指南
• 小车运行指南
• 小车零配件
• 学习者自己组装小车

数据&算法&平台工程师
• 算法开发指南&算法API清单
• 数据采集程序&数据标注工具
• 数据工程师使用提供的标注工具学习数据标注
• 算法&平台工程师依据开放的代码和模型学习
算法开发和部署

平台&应用工程师
• 系统制作指南
• 系统开放环境搭建指南
• 系统开发指南
• 开源的应用代码
• 应用工程师可直接使用预置的AI算法,开发
自己的应用
产品技术规格
| 分类 | 模块 | 子模块 | 规格 |
| 硬件 | 处理器 | AI算力 | 8T@FP16(16T@INT8),支持16路1080p@30fps视频解码,LPDDR4x 8GB |
| 通信系统 | WIFI | 支持802.11 b/g/n, 2X2 MIMO,无线传输速率可达300Mbps | |
| 视觉系统 | Camera | IMX219,8MP | |
| 底盘系统 | 电机 | TT马达,115转/分钟,两轮 | |
| 显示系统 | OLED显示屏 | 0.91吋的Monochrome OLED屏 | |
| 电源 | 电源适配器 | 12V, 3A | |
| 电池 | 锂电池, 4800mAh | ||
| 软件 | 基础软件环境 | 操作系统 | Ubuntu16.04 |
| 开发环境 | Mindspore Studio | ||
| 系统软件 | ROS | Kinetic Version | |
| 系统信息显示 | IP地址显示,系统错误信息显示 | ||
| AI算法应用 | 循线行驶场景 | 基于车道线检测算法的应用,支持预定场景下的算法效果,特定场景由开发者自行采集数据&算法训练作支持 | |
| 避障&防跌落场景 | 基于避障&防跌落算法的应用,支持预定场景(白色桌面上,可躲避饮料瓶、书本、保温杯、纸盒、玩具小人等障碍物自主行驶,同时还可以检测桌子边缘,绕开边缘后自主行驶)下的算法效果,特定场景由开发者自行采集数据&算法训练作支持 | ||
| 手机端软件(仅支持Android) | 远程控制&设置 | 远程设置:算法应用场景/运动控制场景切换 | |
| 远程运动控制:可控制小车向前、向后、左转、右转、加速、减速、停止行驶 | |||
| 远程实时视频流查看:720P@20fps; 1080p@20fps |
产品清单
- 硬件:智能机器人小车Ascbot对外以组装配件形式发布,用户自行组装成小车形态
- 软件:
+ 提供集成了ROS及预置AI算法应用的系统镜像,烧录在SD卡只发布给用户;用户可以通过网站提供的脚本自行下载制作
+ 预置的AI算法、算法SDK及应用场景的代码开源下载
+ 系统镜像下载&烧写脚本
- 技术文档:
+ 包含使用指南,开发指南等
- 资料下载:
资料下载
